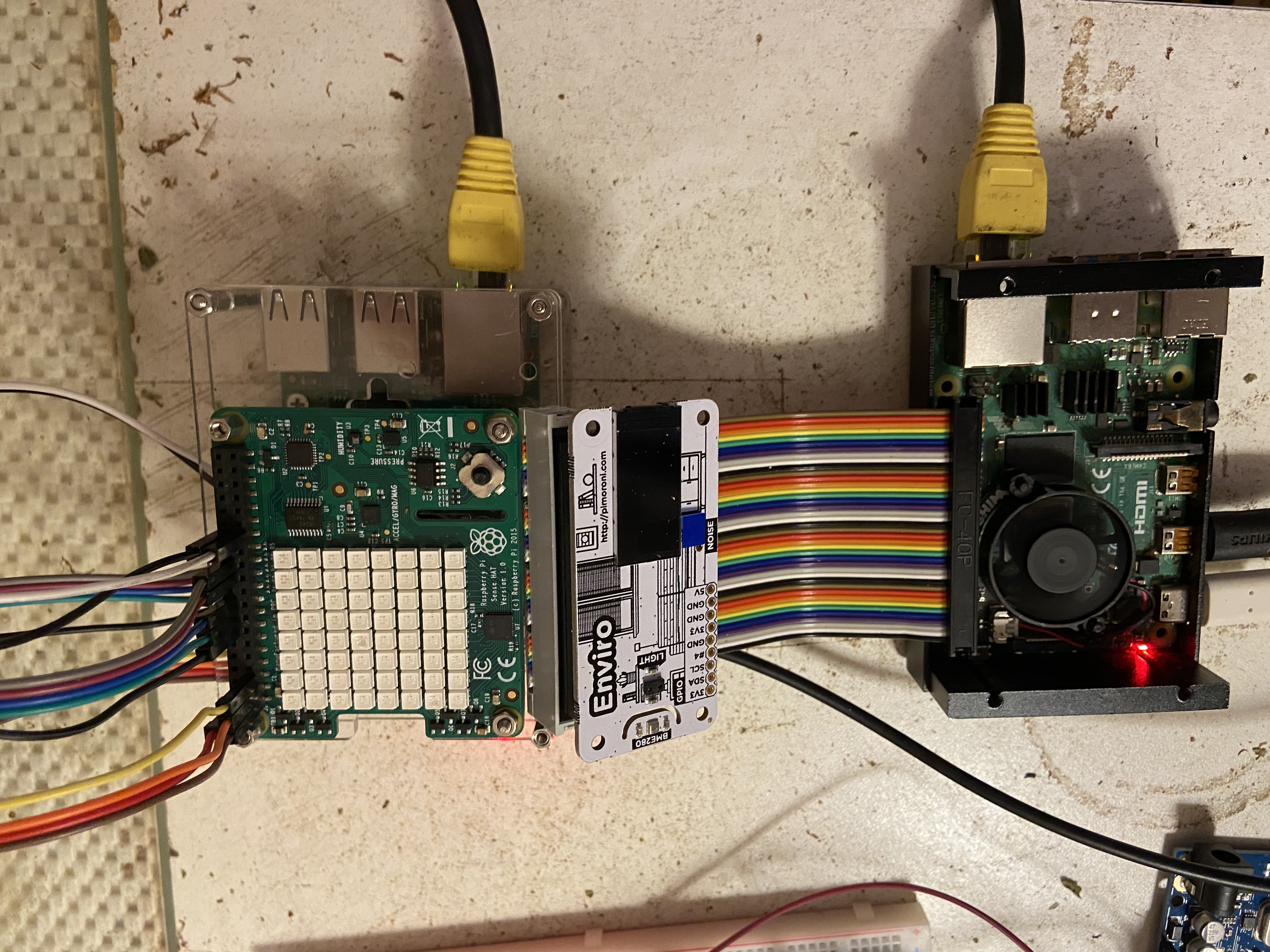
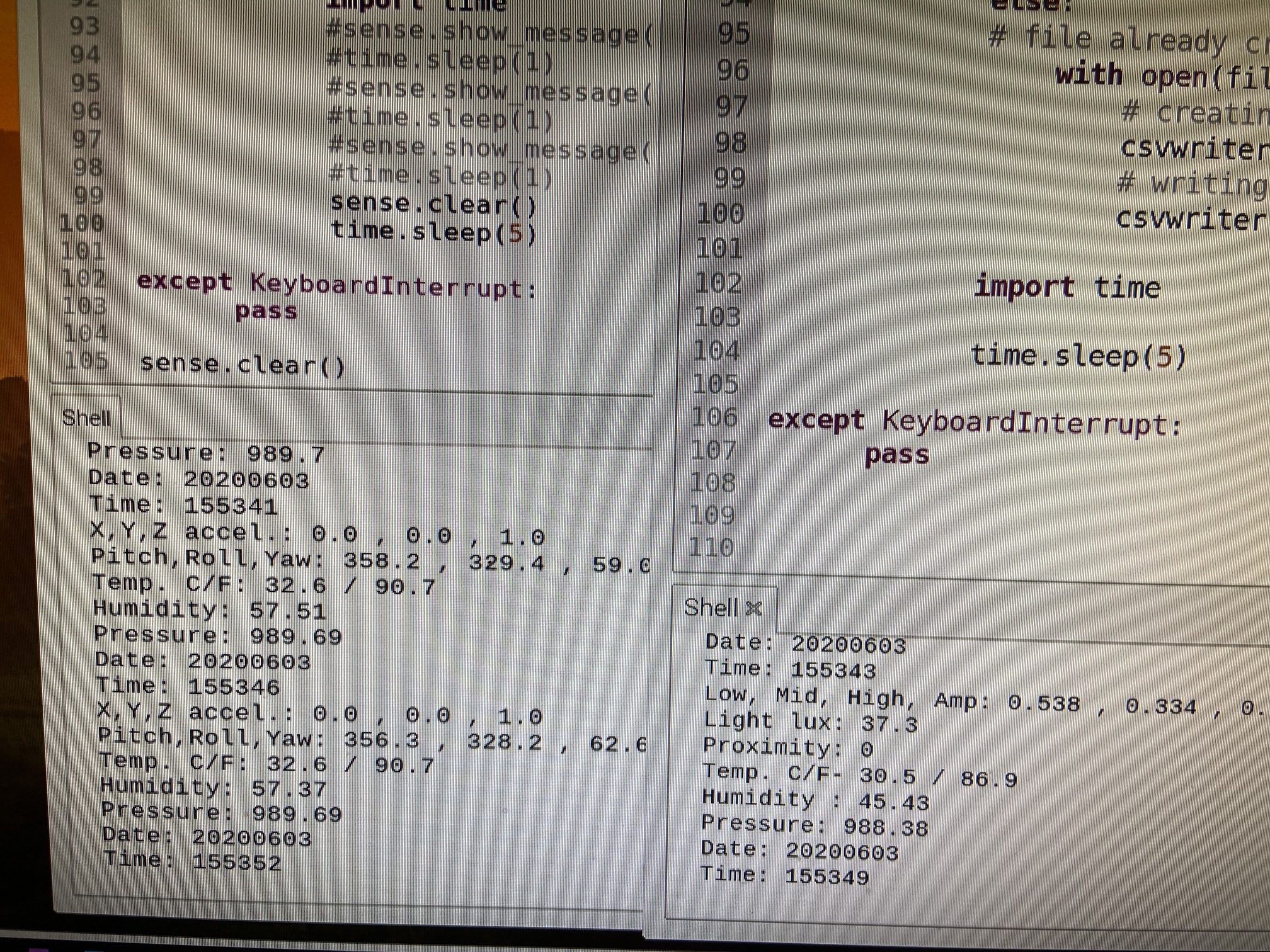
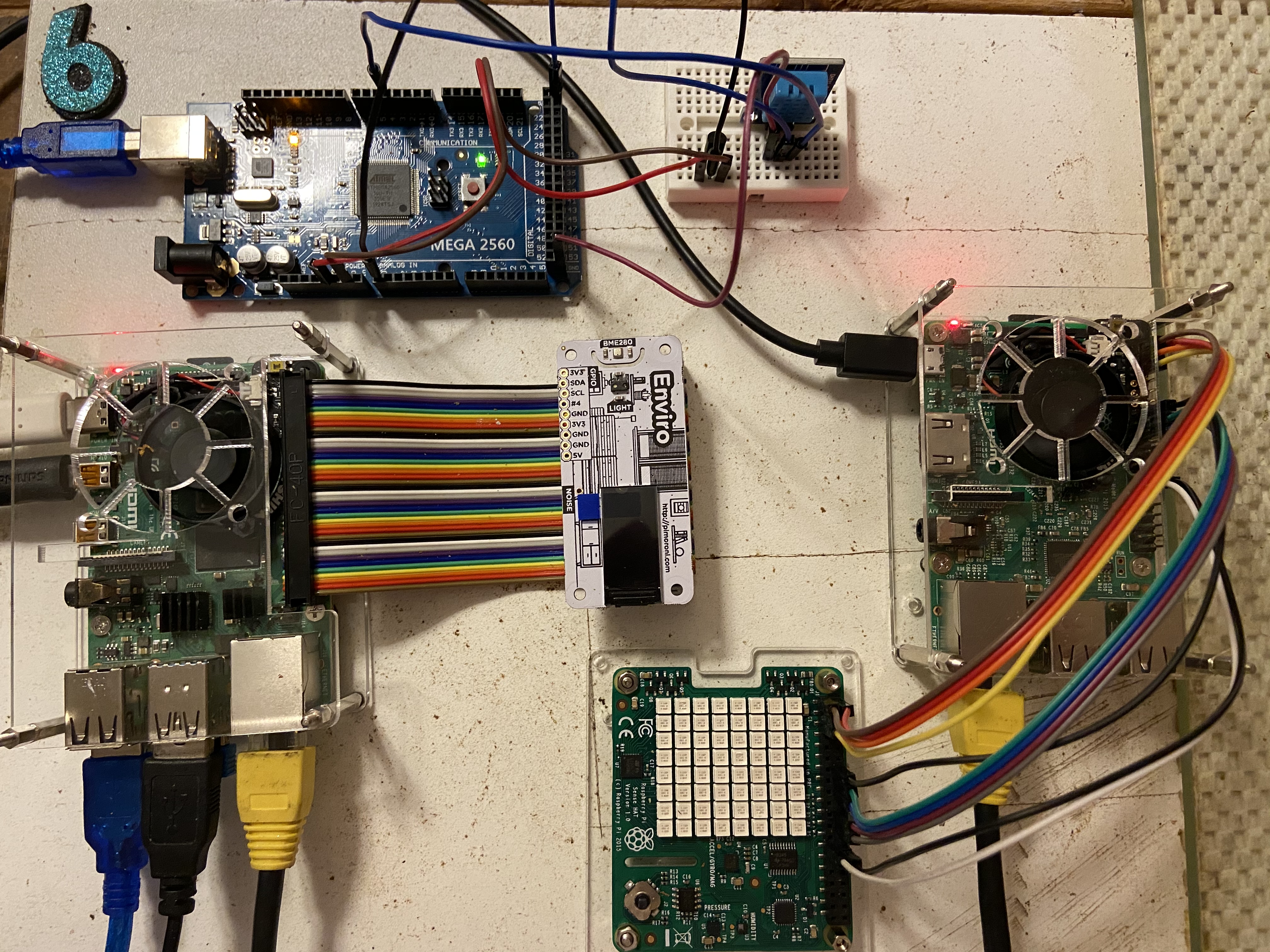
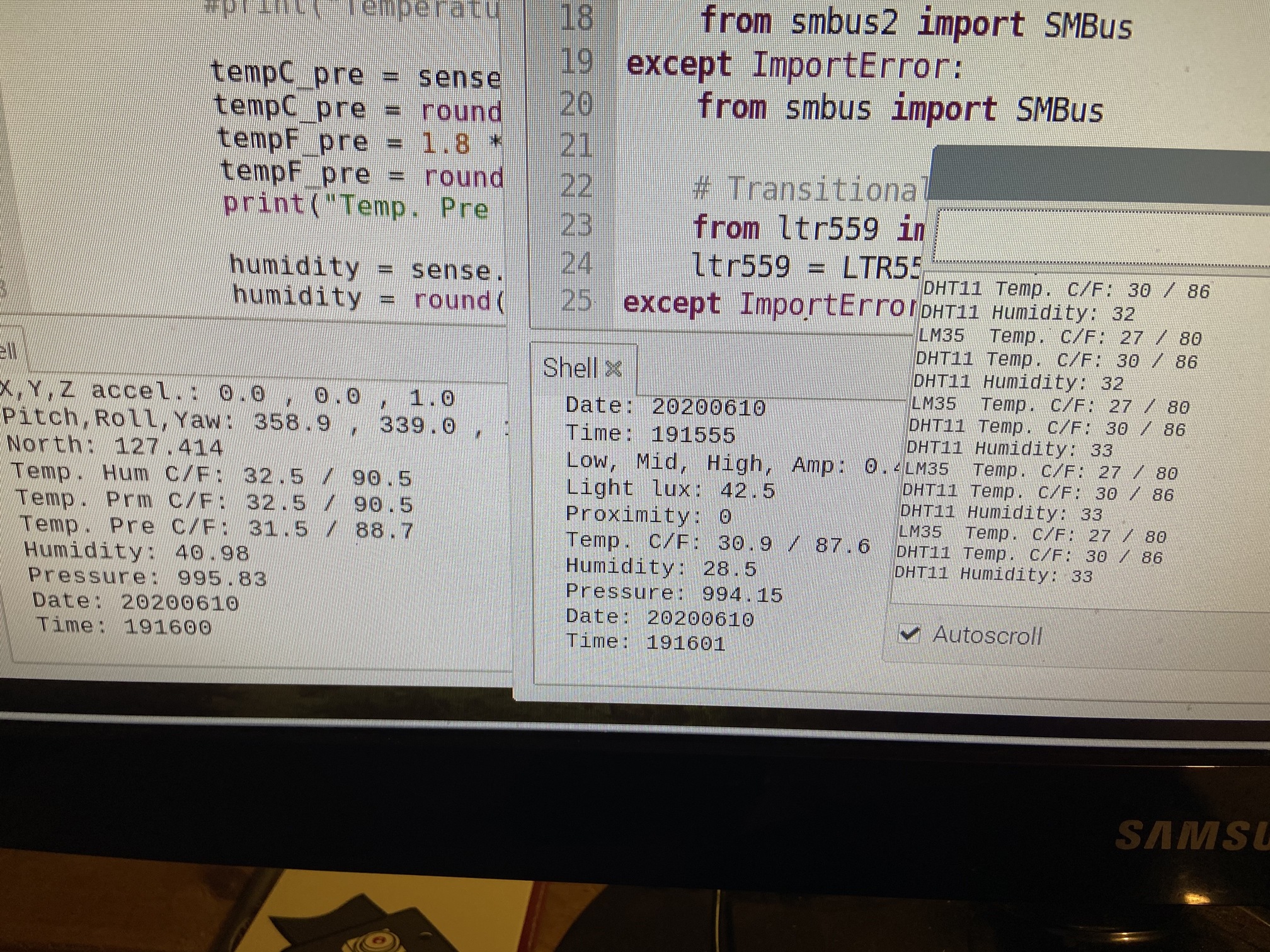
Thanks for all the replies here is some of the code the executing on the Sense, Enviro-Indoor and for a an LM35 and DHT11 from a Mega 2560. Three temperature reads from Sense, either Pressure sensor, Humidty Sensor or Primary. The Primary and Humidity are almost always equal but occasionally differ slightly. That might be just a timing issue between readings. The closest temp between Sense and Enviro is Pressure temperature reading from Sense. But they do seem to be close enough for me at this point. I think I will get a single BME280, a DHT22 and that Dallas 1855? temp sensor and get those all going to see how much each differs.
The Pressure reading are very close between Sense and Enviro so I guess I can count on those, but the humidity readings appear quite a bit different. What is up there? And which one should i have the most confidence in, specifically regarding humidity?
At this time:
Sense = 44.5
Enviro = 28.5
DHT11 = 33
The LM35 temp is always two or three degrees below the rest and the DHT11 temp matches closest with Enviro.
Sense:
from sense_hat import SenseHat
sense = SenseHat()
sense.clear()
sense.set_imu_config(True, True, True)
tempC_hum = sense.get_temperature_from_humidity()
tempC_hum = round(tempC_hum,1)
tempF_hum = 1.8 * tempC_hum + 32
tempF_hum = round(tempF_hum, 1)
print(“Temp. Hum C/F:”,tempC_hum,"/",tempF_hum)
tempC = sense.get_temperature()
tempC = round(tempC, 1)
tempF = 1.8 * tempC + 32
tempF = round(tempF, 1)
print(“Temp. Prm C/F:”,tempC,"/",tempF)
tempC_pre = sense.get_temperature_from_pressure()
tempC_pre = round(tempC_pre,1)
tempF_pre = 1.8 * tempC_pre + 32
tempF_pre = round(tempF_pre, 1)
print(“Temp. Pre C/F:”,tempC_pre,"/",tempF_pre)
humidity = sense.get_humidity()
humidity = round(humidity, 2)
print(“Humidity:”,humidity)
pressure = sense.get_pressure()
pressure = round(pressure, 2)
print(“Pressure:”,pressure)
Enviro-Indoor:
from bme280 import BME280
from smbus2 import SMBus
bus = SMBus(1)
bme280 = BME280(i2c_dev=bus)
tempC = bme280.get_temperature()
tempC = round(tempC, 1)
tempF = 1.8 * round(tempC, 1) + 32
tempF = round(tempF, 1)
print(“Temp. C/F:”,tempC,"/",tempF)
humidity = bme280.get_humidity()
humidity = round(humidity, 2)
print(“Humidity:”,humidity)
pressure = bme280.get_pressure()
pressure = round(pressure, 2)
print(“Pressure:”,pressure)
Arduino:
#include <dht.h>
dht DHT;
#define DHT11_PIN 4
int potPin = 0; // initialize analog pin 0 for LM35 temperature sensor
int LM35sig=analogRead(0);//
int LM35tempC=(125LM35sig)>>8;//
int LM35tempF=(LM35tempC1.8)+32; //f
Serial.print("LM35 Temp. C/F: “);//
Serial.print(LM35tempC);//
Serial.print(” / ");
Serial.println(LM35tempF);
int chk = DHT.read11(DHT11_PIN);
int DHT11tempC = DHT.temperature;
int DHT11tempF = (DHT11tempC*1.8)+32;
Serial.print("DHT11 Temp. C/F: “);
Serial.print(DHT11tempC);
Serial.print(” / ");
Serial.println(DHT11tempF);
int DHT11hum = DHT.humidity;
Serial.print("DHT11 Humidity: ");
Serial.println(DHT11hum);